Abstract
This paper introduces a lightweight framework designed to enhance UAV operations for low-altitude flying in agriculture fields. Farmlands are often filled with obstacles such as trees, structures, and poles, which can be dangerous when flying low. To address this challenge, the proposed system combines depth data from RGB-D camera with an IMU to generate LiDAR-like data, ensuring seamless integration with any range sensor-based avoidance algorithms. The entire perception and processing stack runs on the sense-and-avoid module, which can be easily mounted on MAVLink compatible flight controller. This allows the UAV to detect and avoid obstacles in real time, transitioning from semi-autonomous to fully autonomous flight control. By minimizing yaw during navigation, the system ensures both energy efficiency and stability, using only 40 % of the onboard processor, leaving room for the integration of additional functionalities, such as aerial spraying, data collection, etc. The effectiveness of the system was validated through simulations and real-world tests, showing reliable performance in diverse agricultural settings. This vehicle-agnostic sense-and-avoid technology has broad applications in agriculture, surveillance, and disaster relief, improving UAV navigation in obstacle-dense environments.
Architecture
Unmanned Aerial Vehicles (UAVs) play a key role in precision agriculture, performing tasks such as crop monitoring, spraying, and yield estimation. However, low-altitude UAV operations face risks from obstacles like trees, poles, and wires, especially in challenging environments with wind, dust, and mist. To address these challenges, integrating robust sensing and obstacle avoidance technologies is critical.
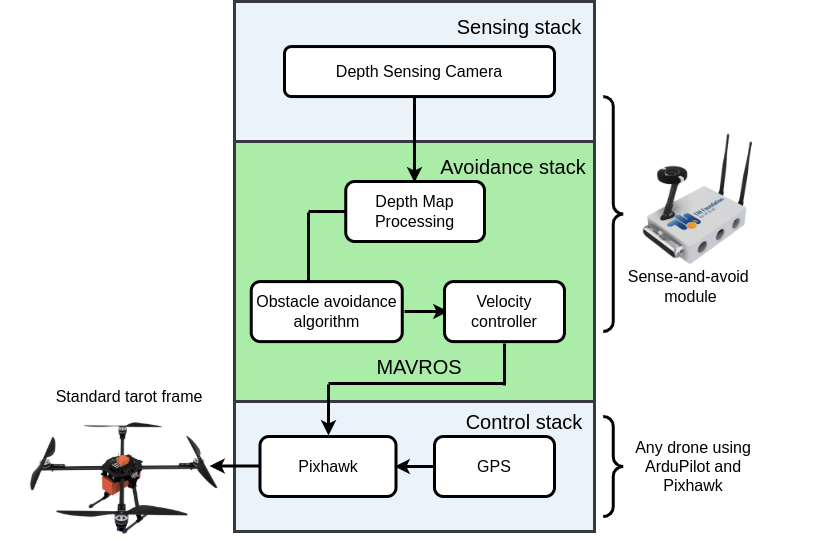
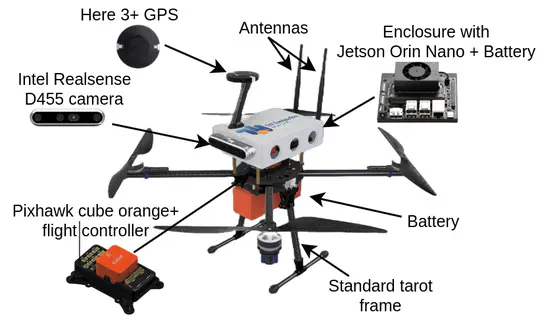
This paper proposes a sense-and-avoid module, compatible with MAVLink-based flight controllers. It enables seamless transition from semi-autonomous to fully autonomous flight, enhancing obstacle detection and avoidance. The lightweight, flexible architecture allows scalability, supporting future functionalities such as aerial spraying and data collection.
Experimental Validation
To thoroughly evaluate the performance of the sense-and-avoid module, we conducted a series of experimental field tests in real-world environments. These tests aimed to validate the algorithms' effectiveness in navigating obstacles in dynamic settings.
The figure below illustrates the operation of our sense-and-avoid module, which employs a boundary-following state of the tangent bug-based obstacle avoidance algorithm after detection of obstacle,
Below is the implementation of the sense-and-avoid module using the modified tangent bug algorithm, which is designed to optimize the coverage of marked areas in the field, applied to the tree-and-pole obstacle scenario,
The table below compares the performance of the sense-and-avoid module using the tangent bug and modified tangent bug algorithms for the tree-and-pole obstacle scenario, based on metrics such as yaw angular velocity and centerline deviation,
| Tangent bug implementation | Modified tangent bug implementation | |
|---|---|---|
| Min angular velocity(rad/s) | -0.113200 | -0.426940 |
| Max angular velocity(rad/s) | 0.113980 | 1.118620 |
| Average angular velocity(rad/s) | -0.006350 | 0.000190 |
| Min centerline deviation(m) | 0.15 | 0.1 |
| Max centerline deviation(m) | 4.89 | 4.65 |
| Average centerline deviation(m) | 2.43 | 3.04 |
| Safety distance(m) | 2.5 | 1.5 |
Testing and Validation of Sense-and-Avoid Technology in Diverse Environments
The sense-and-avoid technology (based on tangent bug implementation) was thoroughly tested in a variety of scenarios, showcasing its strong performance in diverse environmental conditions. To assess the effectiveness of the proposed sense-and-avoid module, we conducted a series of tests at General Aeronautics' farmlands in Bangalore and at the Gymkhana Ground at IIT Bombay. The technology was evaluated for,
- Detection and avoidance of multiple obstacles
- Trees of various shapes and sizes

- Detection and avoidance of shrubs at different heights
The technology performed effectively in the presence of strong winds, dust, and bright sunlight, demonstrating its robustness in detecting and avoiding obstacles. It consistently maintained performance across a variety of environmental conditions, including trees of different shapes and sizes, multiple obstacles, and varying altitudes.
Citation
@misc{sna2025,
title={Advancing Low-Altitude Agricultural UAV Operations: Plug-and-Play Device for Sensing and Obstacle Avoidance},
author={},
year={2025},
journal={}
}